Treadscan documentation
Required Python version: python3.8 or higher.
Required packages: numpy, opencv-python, opencv-contrib-python, improutils.
To build this documentation, you need Sphinx, numpydoc and sphinx-rtd-theme.
Treadscan modules:
|
This module is used for detecting stopped vehicle(s) from camera footage. |
|
This module is used for image segmentation, in particular to find the ellipse defining the tire position in image. |
|
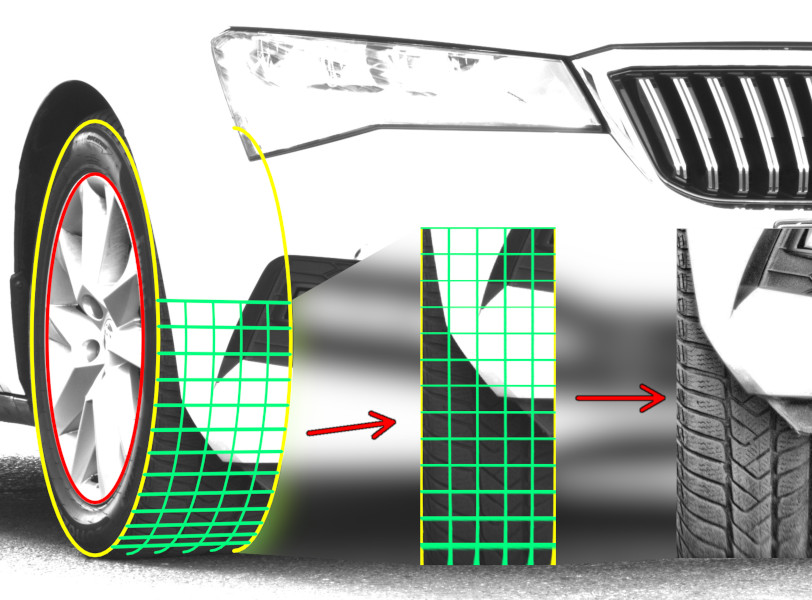
This module is used for tread extraction (unwrapping) given the image and the ellipse defining the vehicle's rim in image. |
|
This module contains various useful methods that can be used in multiple different places. |
Treadscan classes:
|
Enum class specifying types of input for Detector class. |
Class for extracting GRAYSCALE frames from video or folder of images. |
|
Simple background subtractor immune to sleeping person phenomenon (an object that stops moving won't become a part of the background). |
|
|
Detects presence and motion of a vehicle from footage, yielding 1 image per 1 stopped vehicle. |
|
Uses region based convolutional neural network model to find car wheels in images. |
Contains methods for image segmentation and ellipse detection. |
|
|
Model representing a tire. |
|
Class which defines an ellipse. |
Table of Contents